發布時間:2021/08/09 04:22 點閱數:713
執行成果介紹
研發智慧巡檢機器人平台-
整合影像辨識及環境監測應用於防災預警
一、計畫介紹
本計畫擬建構具多功能與易於佈建之文物資產智慧巡檢機器人平台,系統具有空氣品質及紅外線熱影像等環境監測進行防火、防災預警。計畫中經由古蹟建築紅外線熱影像,將測試古蹟建築結構體安全檢測及電力設備發熱故障預警,以及對古物進行防盜保全盤點。
本計畫系統設計主要是建構光達掃描、機器視覺、空氣品質及紅外線熱影像等環境監測感測器,整合即時定位與地圖構建技術研發智慧巡檢機器人。在此以開發車載光達感測器應用光達里程和測繪演算法,再配合邊緣運算據以即時取得解算結果。系統並加入全球定位系統及慣性測量單元技術,進行室內、外精準定位。由定位功能,以轉換三維建築之空間定位及絕對座標關係,可取得空間資料。機器人平台具導航定位及可移動性的快速及重點加強空間掃描功能。平台並結合紅外線熱影像及高解析工業相機同步拍攝,所得結果可導入應用於古蹟建築防災預警,與古物資訊化行動巡查管理維護上的應用。
二、計畫初步執行成果
本計畫現階段完成果
(1) 空氣品質感測與古蹟建築防火預警技術應用:
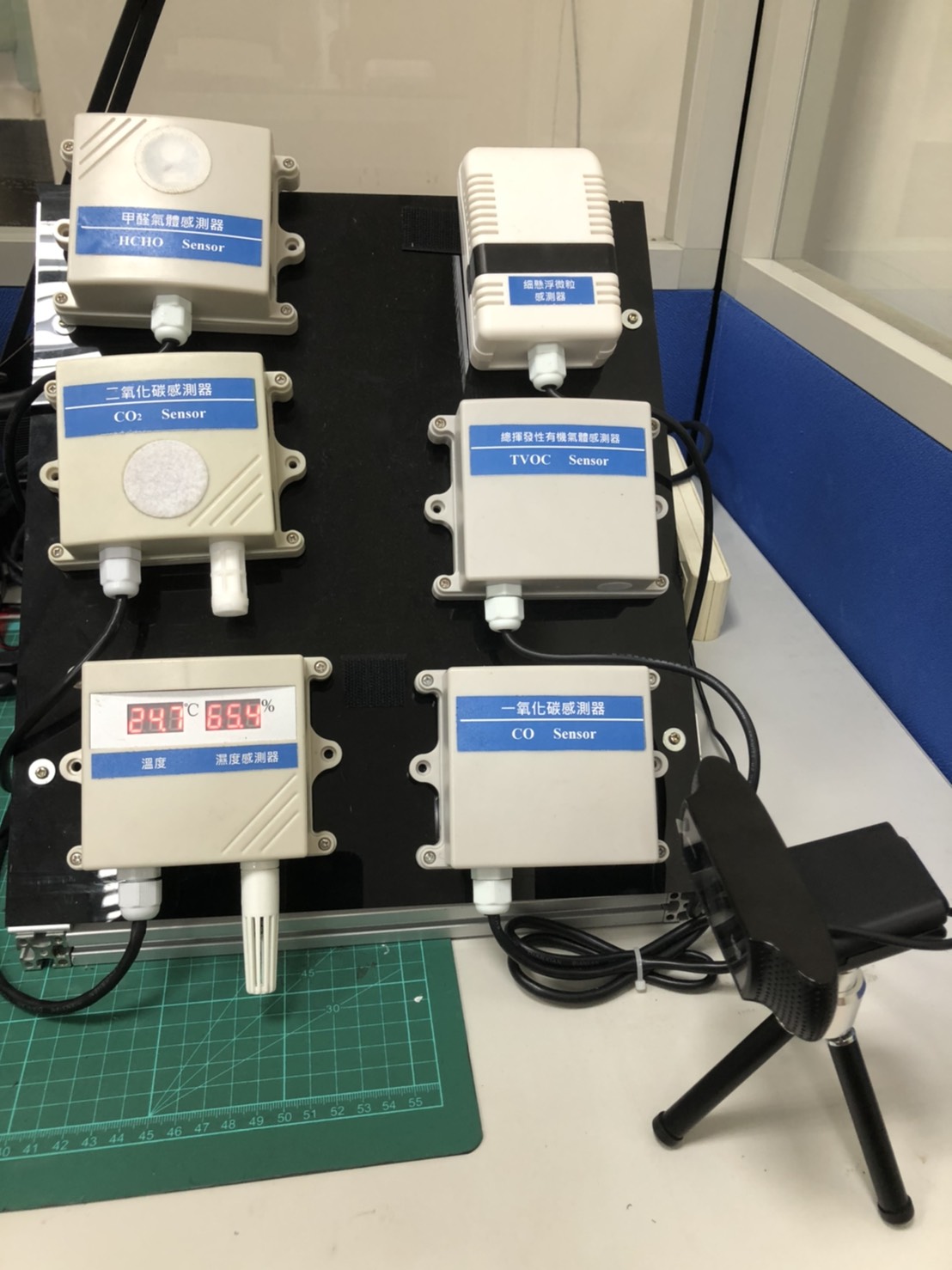
計畫以美國國家儀器公司(National Instruments, NI)所提供擷取卡,配合LabView軟體自行開發空氣品質偵測整合系統。室內空氣品質感測器則包含溫度、濕度、二氧化碳、一氧化碳、總揮發性氣體(TVOC)、甲醛、懸浮微粒(PM10)、細懸浮微粒(PM2.5) 等,可以即時瞭解所處室內環境的空氣品質狀況。
(2) 紅外線熱影像測溫與古蹟建築防火預警技術:
計畫以FLIR
AX8所提供紅外線熱影像儀及自行製作量測箱,並根據紅外線熱影像偵測系統,可監測環境溫度上升情況。
(3) 光達具有即時定位與地圖構建(SLAM)功能:
即時定位與地圖構建技術(Simultaneous
Localization and Mapping, SLAM)。是指機器人在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和傳感器數據進行自身定位,同時能建造增量式地圖。
(4) 巡檢機器人自動導航及避障功能:
系統基於 ROS 的 Lidar 建構
SLAM 地,支持鍵盤、手機 APP 控制構圖、可視化圖形、以及室內自動導航與動態避障及定位。
影片連結:
撰寫單位:正修學校財團法人正修科技大學
照片
空氣品質感測器
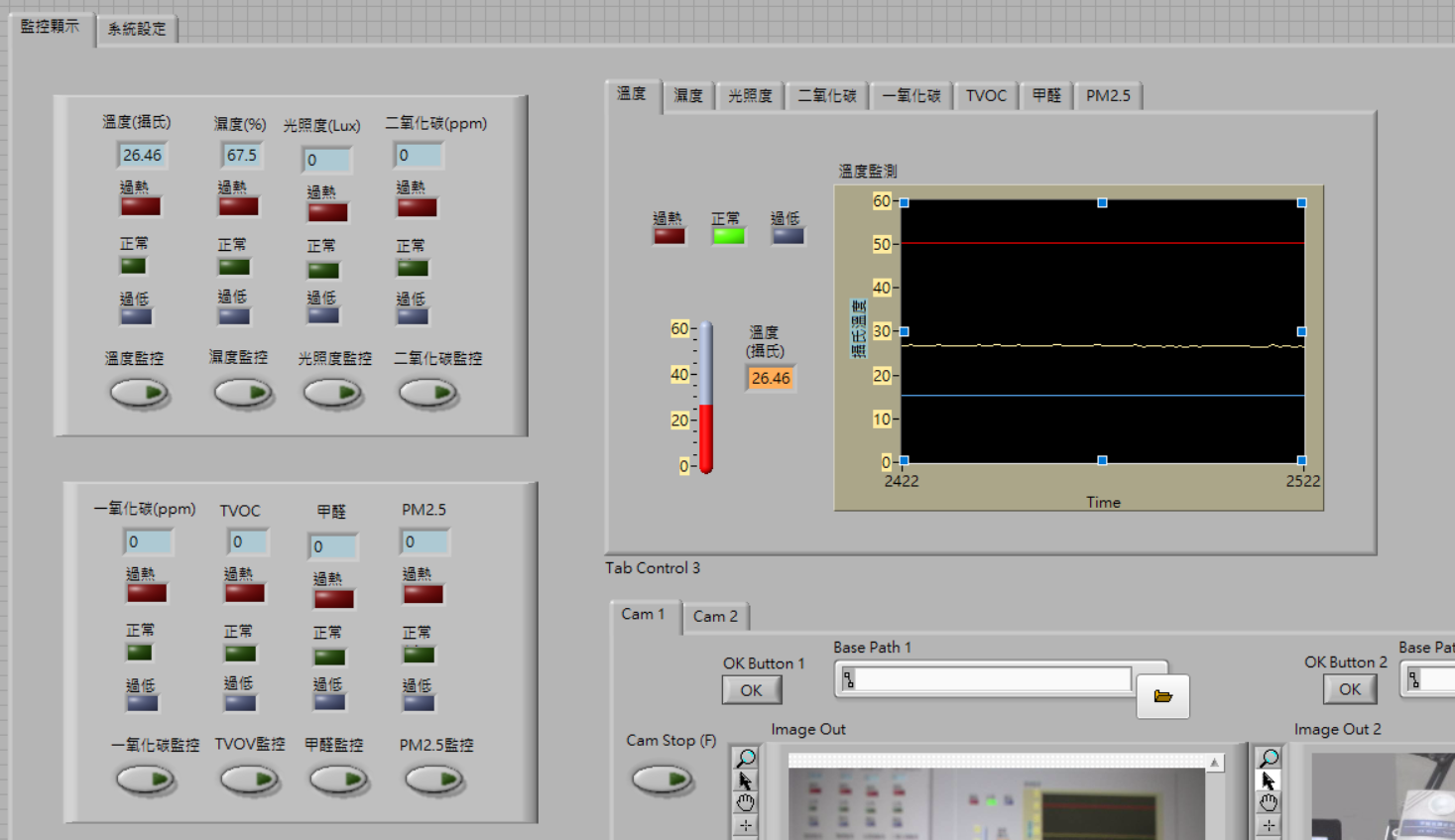
空氣品質感測人機介面
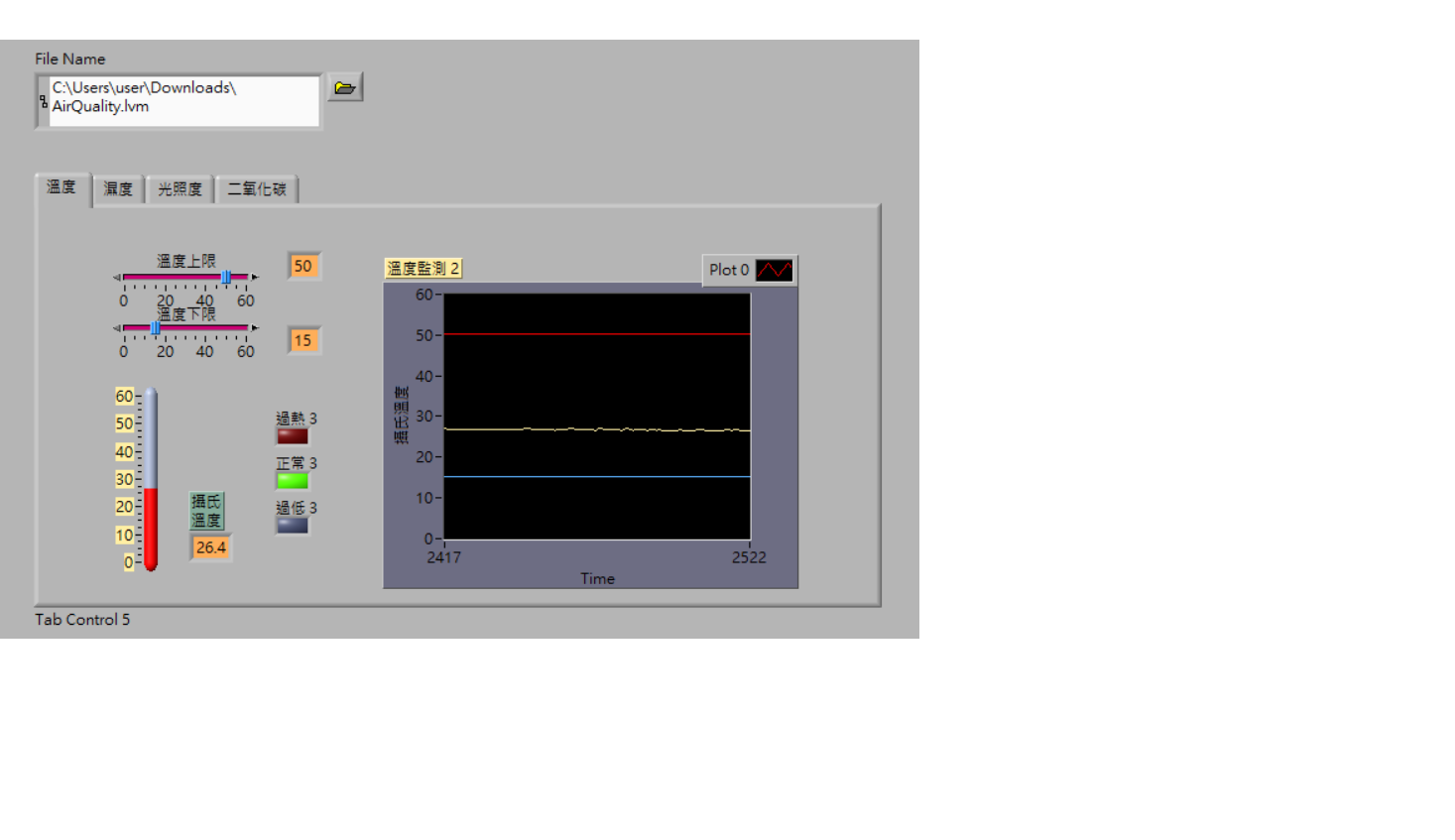
空氣品質感測-設定介面
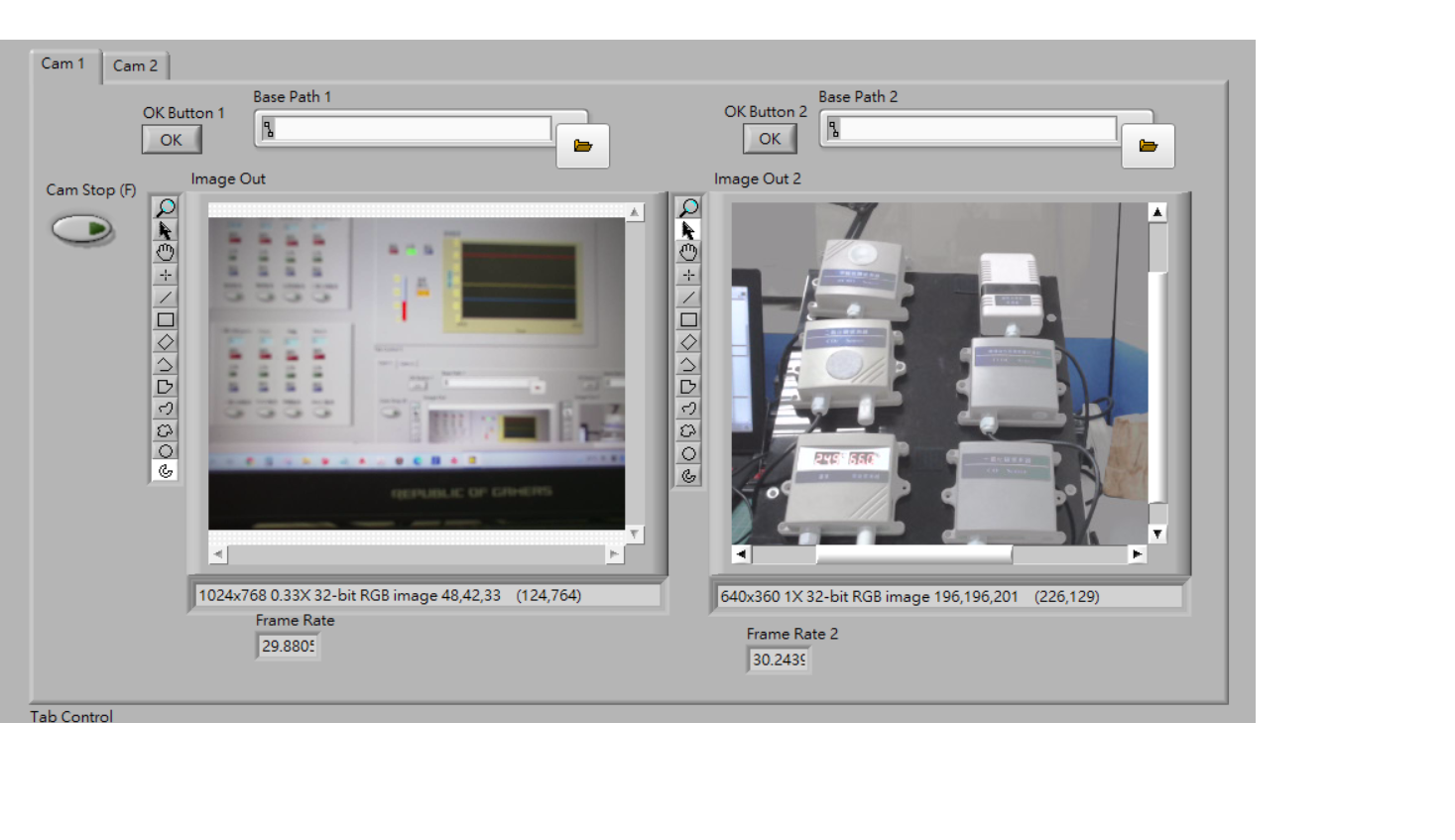
影像偵測介面
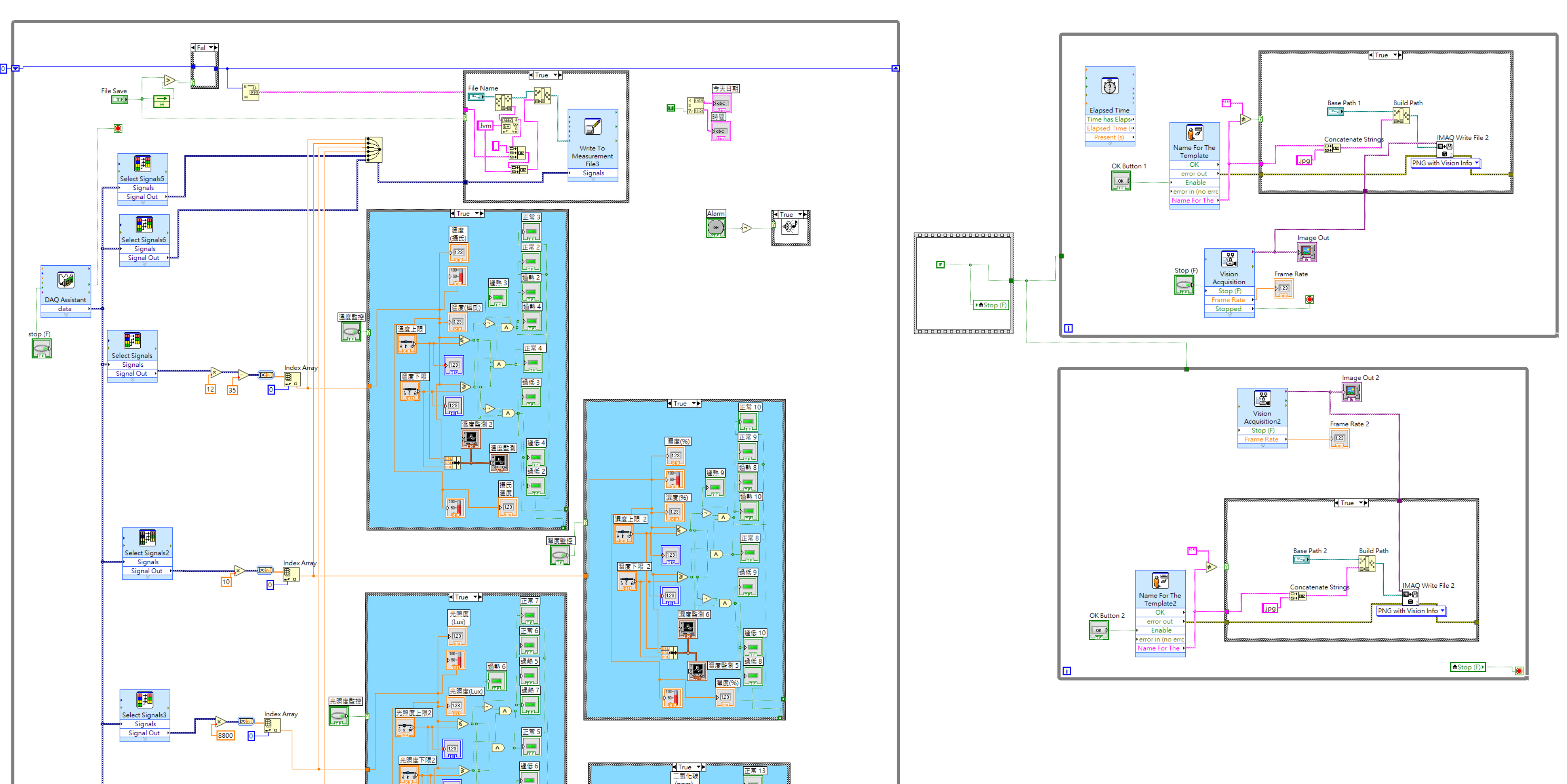
空氣品質感測-圖控程式
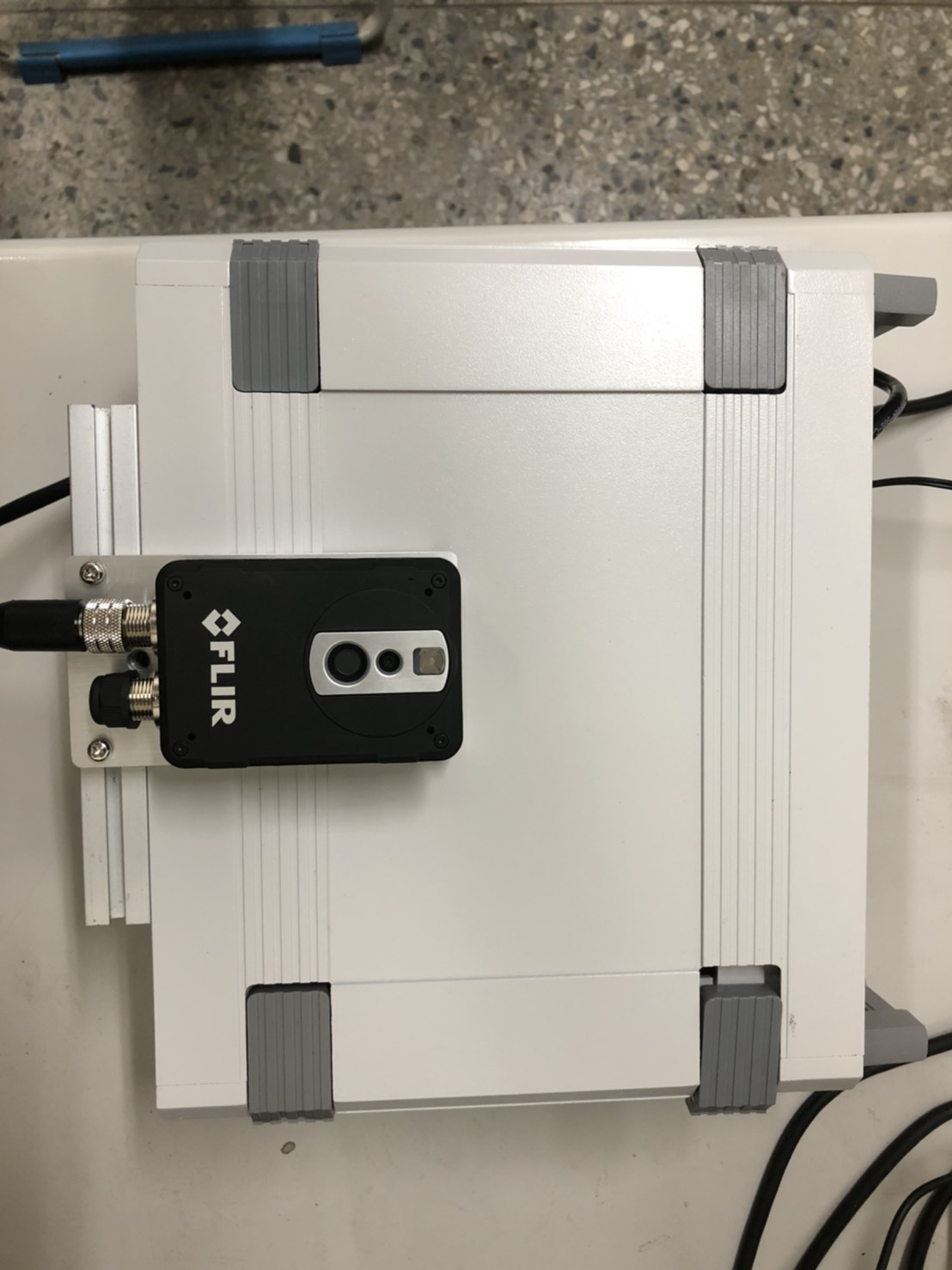
紅外線熱影像整合系統
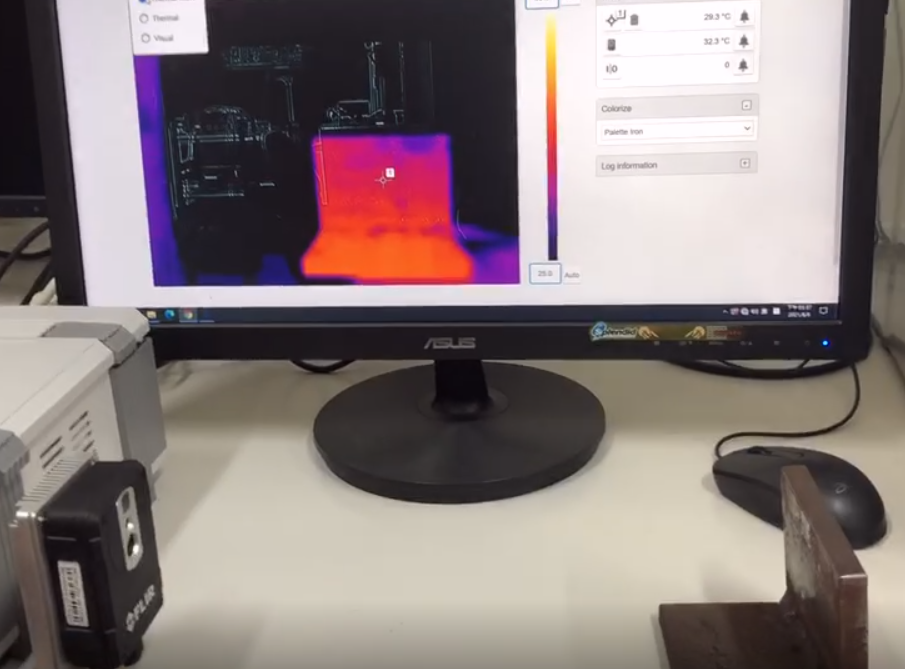
紅外線熱影像測溫
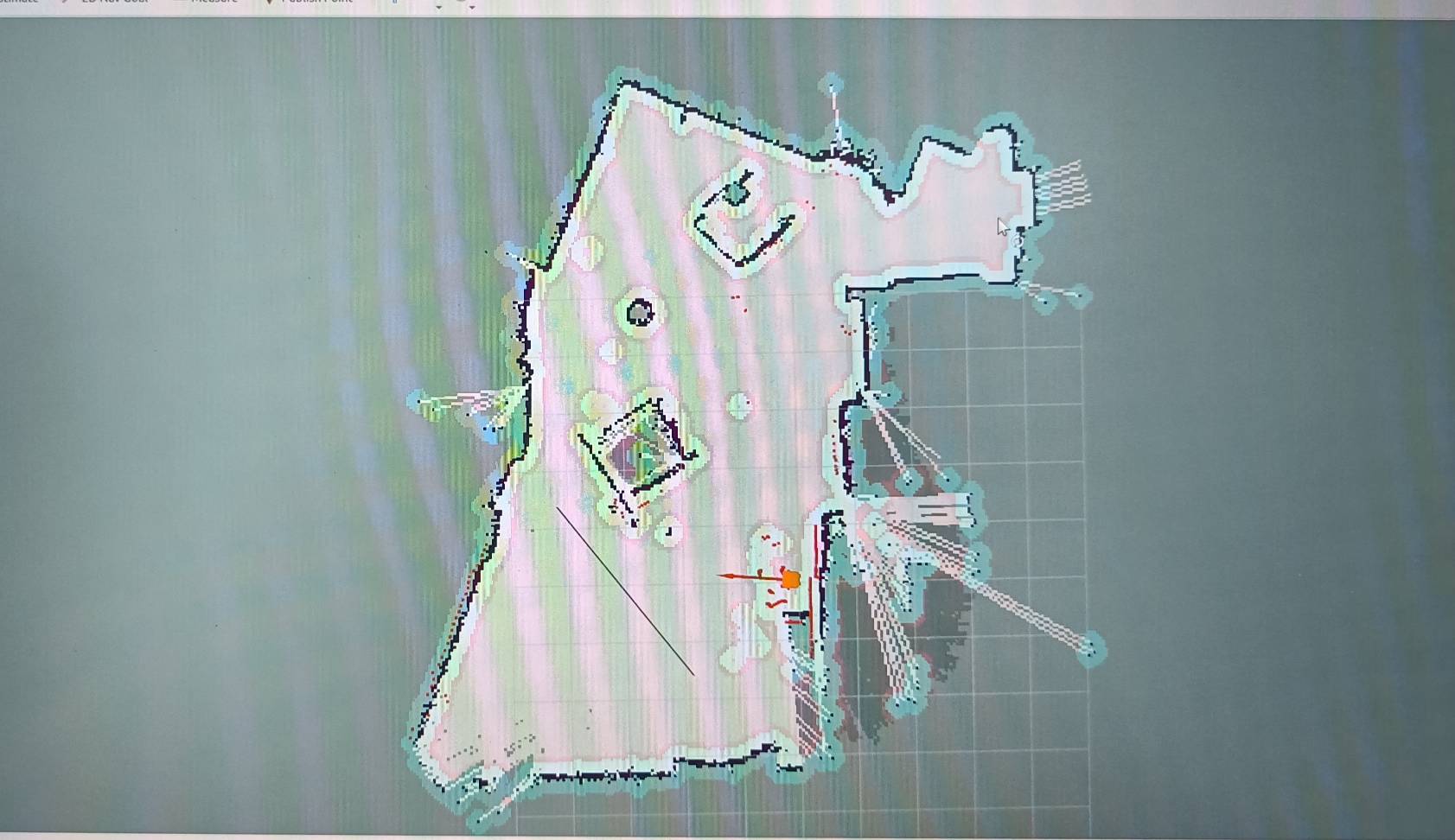
即時定位與地圖構建
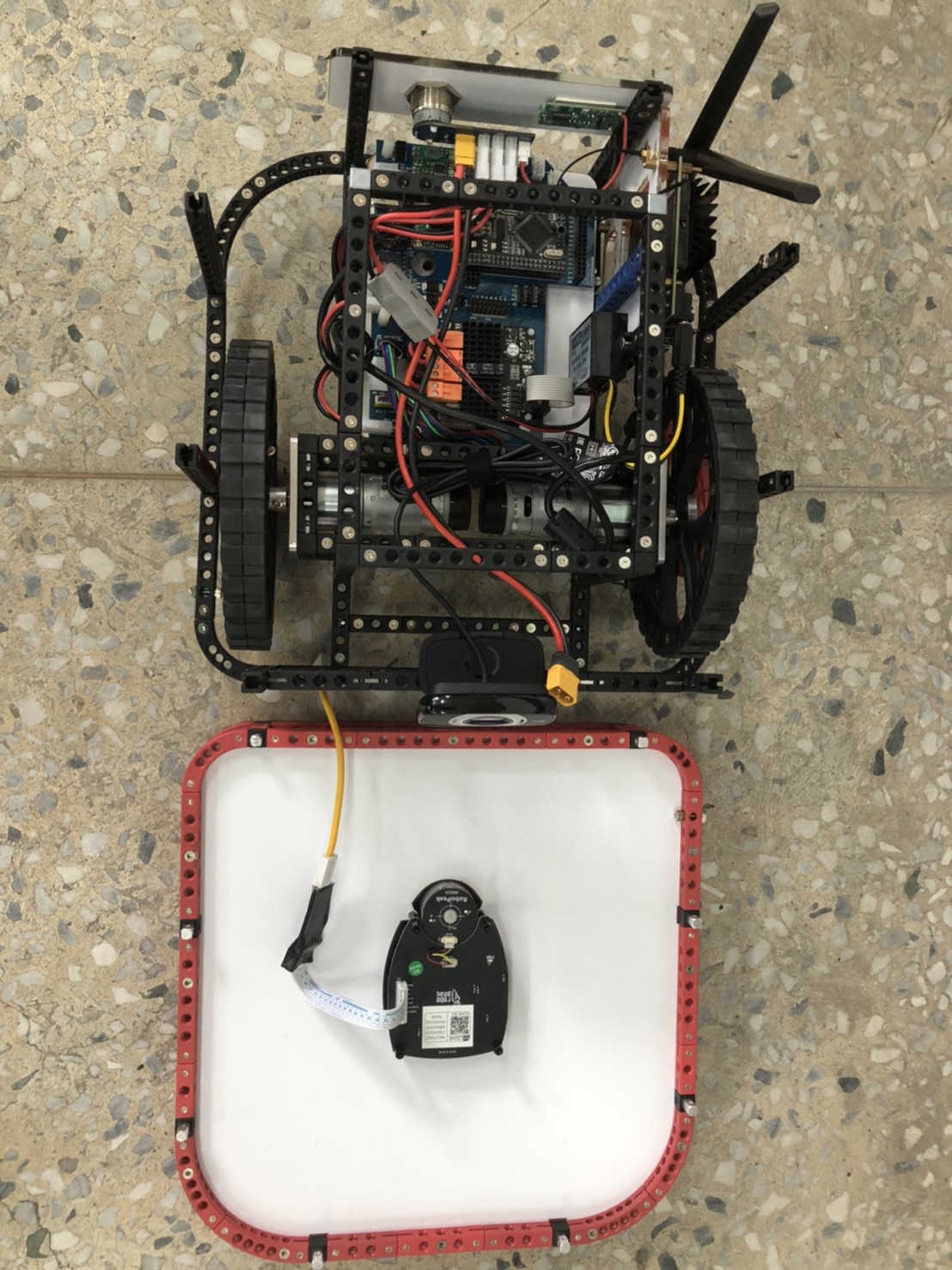
巡檢機器人硬體構造

巡檢機器人外觀

